使用脚本
🌍 全局函数
显示与导出
show() - 显示对象
lua
show(object) -- 显示单个对象
show(object_list) -- 显示对象列表参数:
object- shape - 要显示的形状对象object_list- table - 形状对象列表{obj1, obj2, ...}
📦 形状对象
立体形状
shape - 基础形状类
lua
shape.new(filename) -- 从文件加载(支持 *.step, *.stl)所有形状的基类,可从文件加载现有模型。
box - 长方体
创建一个长方体
lua
box.new() -- 默认: x=y=z=1,从(0,0,0)到(1,1,1)
box.new(x, y, z) -- 自定义尺寸,从(0,0,0)到(x,y,z)
box.new(vertex1, vertex2) -- 通过两个顶点构造长方体,从(x1,y1,z1)到(x2,y2,z2)参数:
x, y, z- number - 盒子对角线从 (0,0,0) 到 (x,y,z)
示例:
lua
box.new():show() -- 单位立方体,从(0,0,0)到(1,1,1)
box.new(2, 1, 0.5):y(3):show() -- 长方体,从(0,0,0)到(2,1,0.5)
-- 边长信息文本
text.new('x=2', 0.5):x(0.5):y(2.5):color('red'):show()
text.new('y=1', 0.5):x(2.5):y(3):rz(90):color('green'):show()
text.new('z=0.5', 0.2):x(0):y(3):rx(90):ry(-90):color('blue'):show()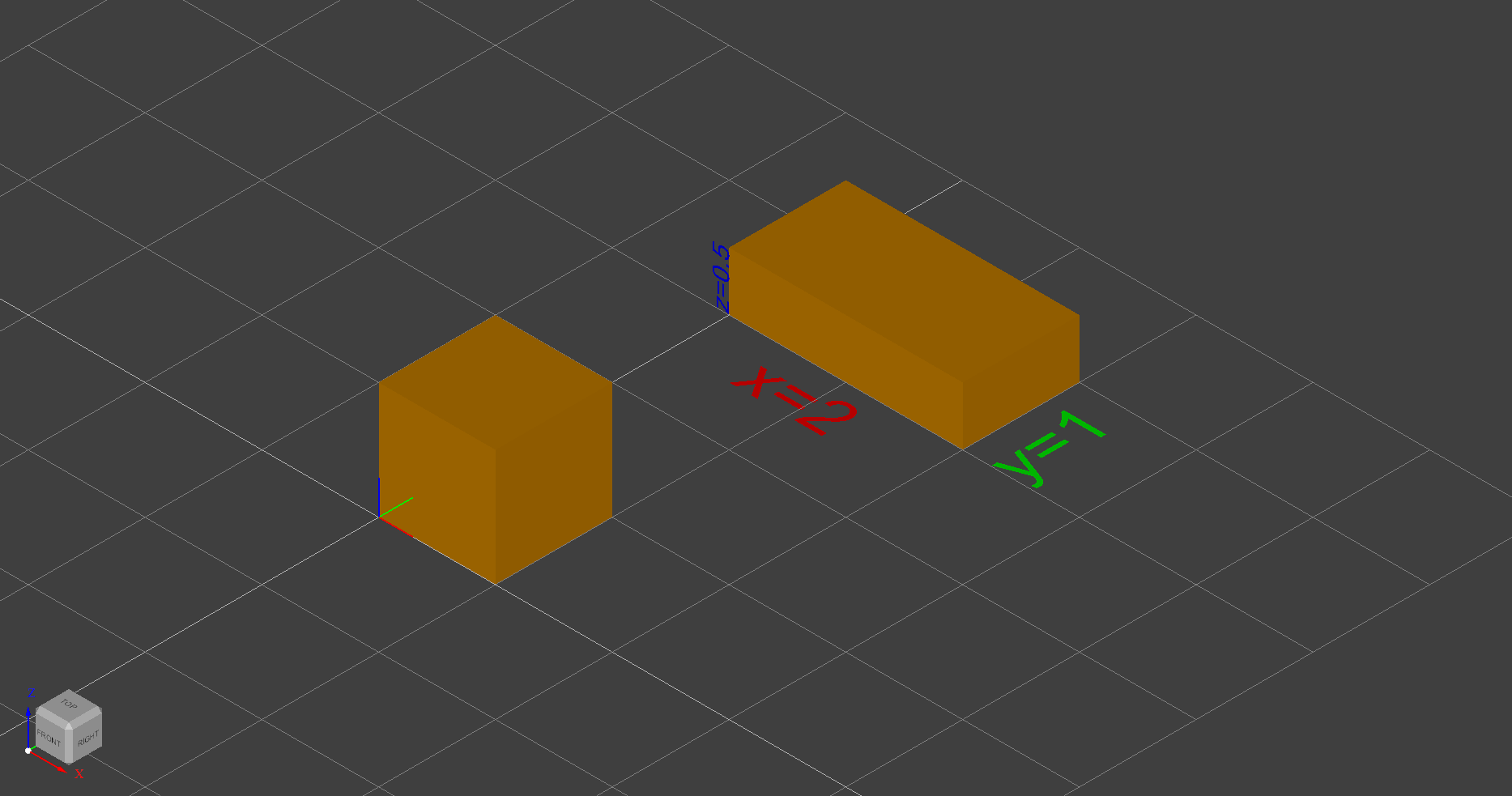
cylinder - 圆柱体
创建一个原点在底部圆心的圆柱体
lua
cylinder.new() -- 默认: r=h=1
cylinder.new(r, h) -- 自定义尺寸
cylinder.new(other_cyl) -- 复制构造参数:
r- number - 半径h- number - 高度
示例:
lua
cylinder.new():show()
cylinder.new(0.5, 2):y(3):show()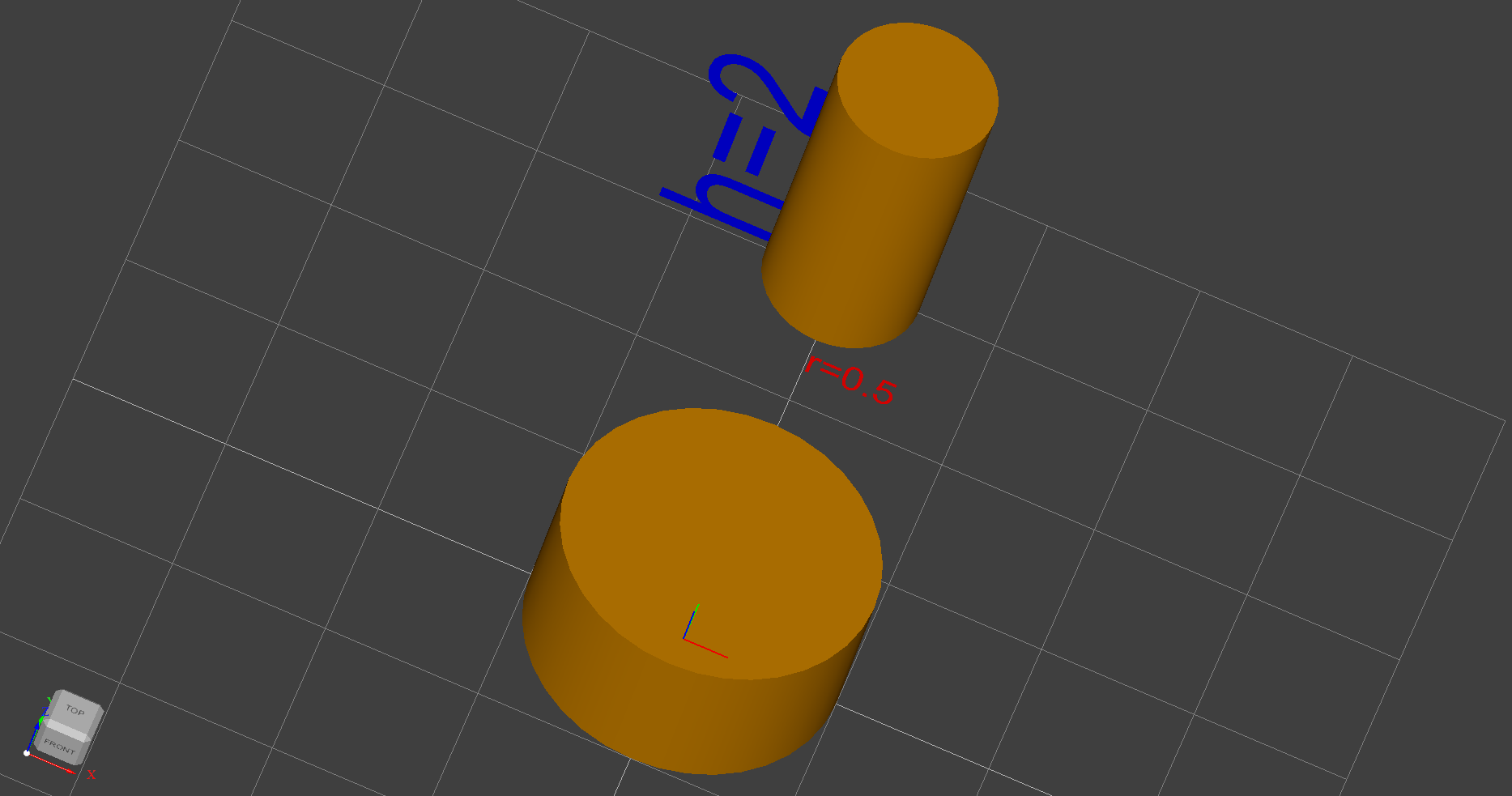
cone - 圆锥/圆台
创建一个原点在底部圆心的圆圆锥/圆台
lua
cone.new() -- 默认: r1=1,r2=0,h=1
cone.new(r1, r2, h) -- 自定义尺寸
cone.new(other_cone) -- 复制构造参数:
r1- number - 底部半径r2- number - 顶部半径(r2=0 为圆锥)h- number - 高度
示例:
lua
cone.new():show()
cone.new(1, 0.5, 2):y(3):show()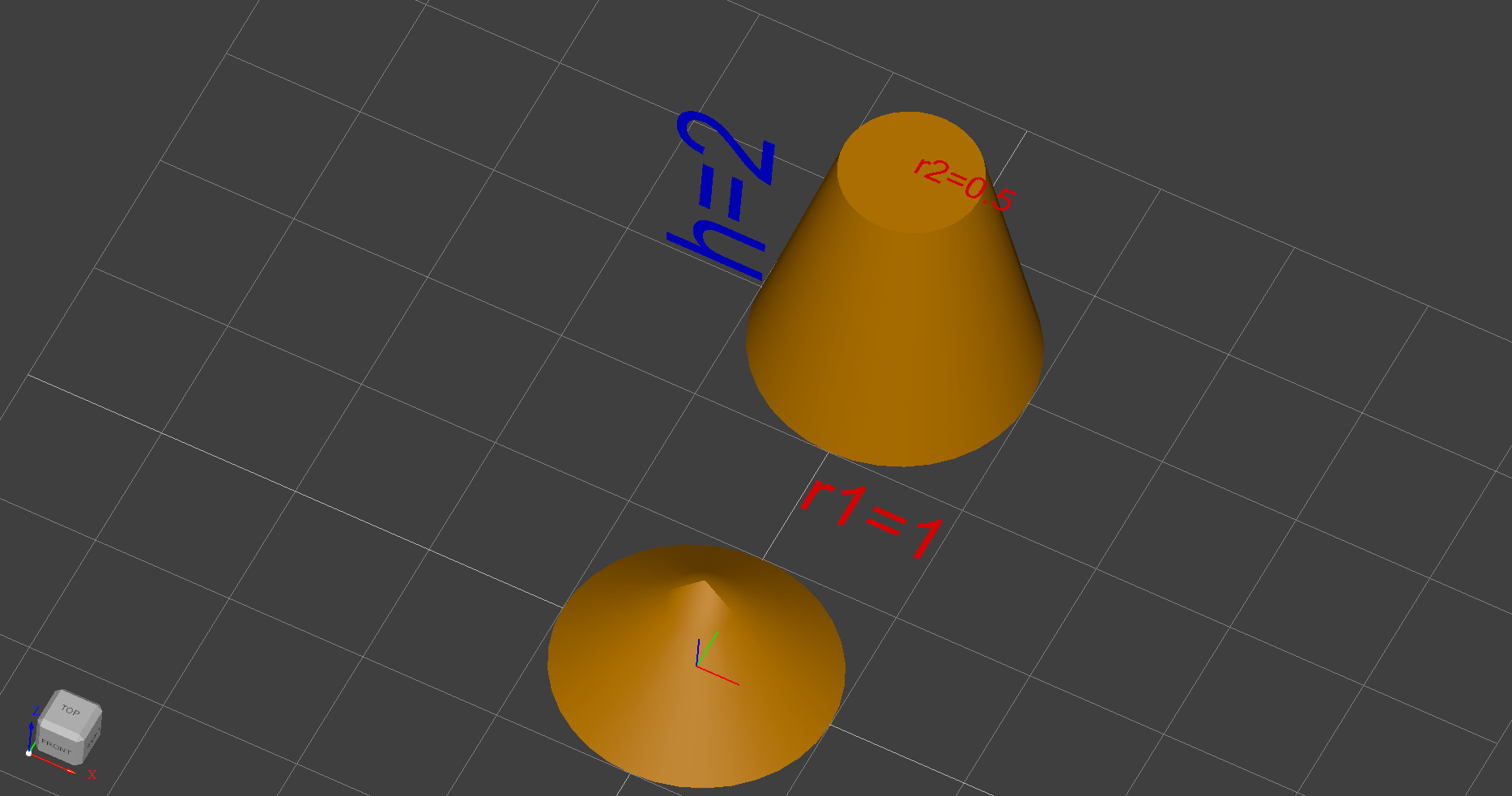
sphere - 球体
创建一个原点在球心的球体
lua
sphere.new() -- 默认: r=1
sphere.new(r) -- 自定义半径
sphere.new(other_sphere) -- 复制构造参数:
r- number - 半径
torus - 圆环
创建一个原点在环心的圆环
lua
torus.new() -- 默认: R1=2,R2=1,angle=360
torus.new(R1, R2, angle)
torus.new(other_torus)参数:
R1- number - 从管道中心到环面中心的距离R2- number - 管道半径angle- number - 角度(deg)
示例:
lua
torus.new(1, 0.5):show()
torus.new(1, 0.2, 180):y(3):show()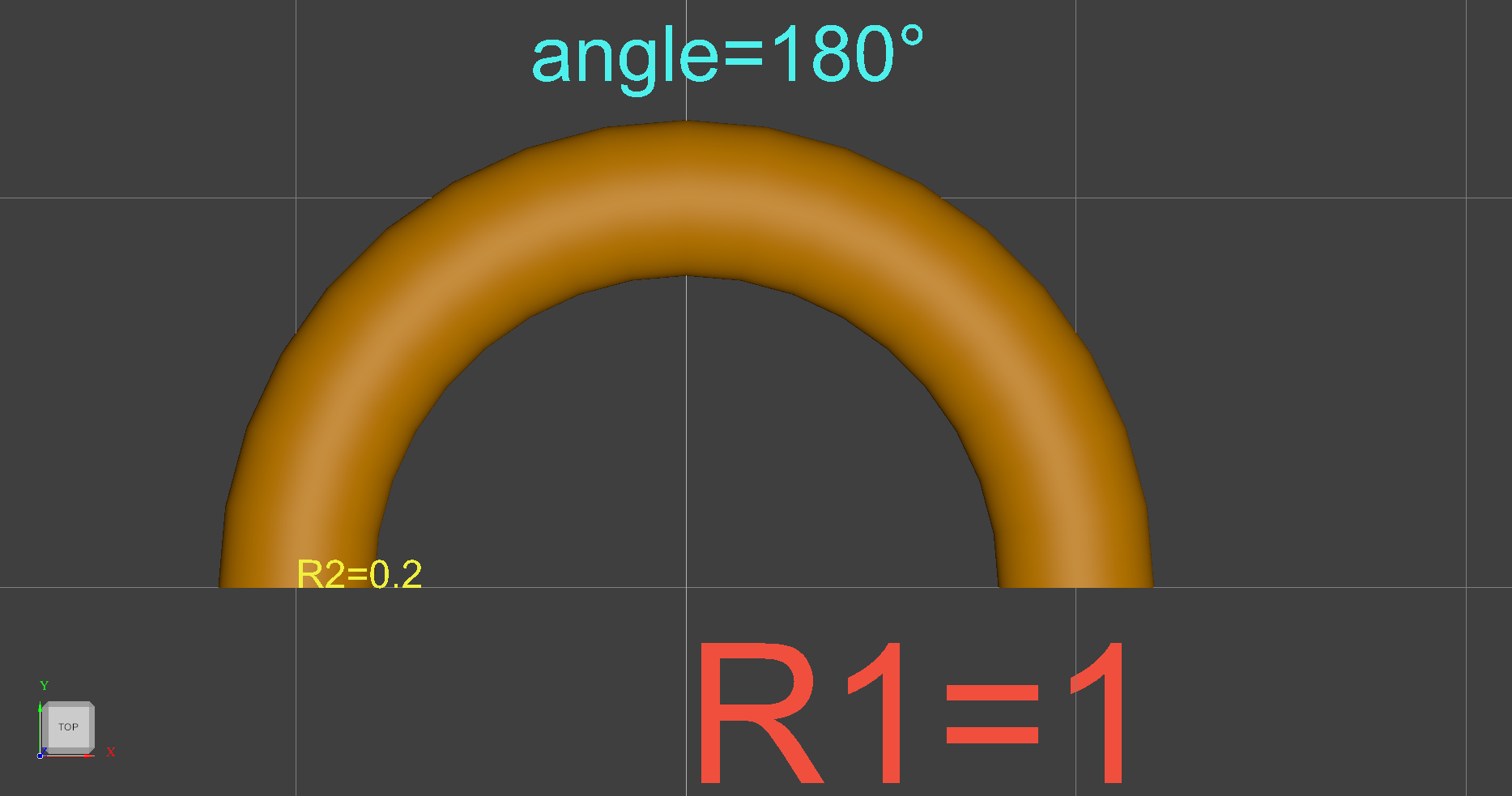
wedge - 楔形
创建一个从原点开始的楔形
lua
wedge.new() -- 默认: dx=dy=dz=1,ltx=0
wedge.new(dx, dy, dz, ltx)
wedge.new(dx, dy, dz, xmin, zmin, xmax, zmax)
wedge.new(other_wedge)参数:
dx, dy, dz- number - 各个方向的长度ltx- number - 楔形中心到X轴的距离xmin, zmin, xmax, zmax- number - 面在dy的最大最小值
二维形状
vertex - 顶点
lua
vertex.new(x, y, z)
vertex.new(other_vertex)参数:
x/y/z- number - 顶点位置坐标
edge - 边缘
lua
edge.new(type, vec1, vec2)
edge.new(type, vec1, vec2, r1)
edge.new(type, vec1, vec2, r1, r2)
edge.new(other_edge)参数:
type- string - 边缘类型"lin"- 直线"circ"- 圆"elips"- 椭圆"hypr"- 双曲线"parab"- 抛物线
vec1- table - 3D点坐标{x, y, z}vec2- table - 3D方向向量{x, y, z}r1- number - 半径(circ/elips/hypr/parab 使用)r2- number - 第二半径(elips/hypr 使用)
子类:
lua
-- 直线
line.new(vertex1, vertex2) -- vertex1:起点[array3], vertex2:终点[array3]
-- 圆形
circle.new(center, normal, radius) -- center:圆心[array3], normal:法向量[array3], radius:半径[number]
-- 椭圆形
ellipse.new(center, normal, radius1, radius2) -- radius1:主半径[number], radius2:小半径[number]
-- 双曲线
hyperbola.new(center, normal, radius1, radius2, p1, p2) -- p1:起点偏移[number], p2:终点偏移[number]
-- 抛物线
parabola.new(center, normal, radius, p1, p2)
-- 贝塞尔曲线
bezier.new(poles) -- poles:极点[array3的数组]
bezier.new(poles, weights) -- weights:权重[number的数组],数据量与极点相同
-- B样条曲线
bspline.new(poles, knots, multiplicities, degree) -- knots:节点向量[number的数组], multiplicities: [number的数组], degree:次数[number]示例:
lua
line.new({ 0, 0, 0 }, { 1, 1, 1 }):show()
circle.new({ 1, 1, 1 }, { 1, 1, 1 }, 3):show()
ellipse.new({ 1, 1, 1 }, { 1, 1, 1 }, 4, 2):show()
hyperbola.new({ 0, 0, 0 }, { 1, 1, 1 }, 4, 2, -2, 2):show()
parabola.new({ 2, 1, 3 }, { 1, 1, 1 }, 3, -2, 2):show()
bezier.new({ { 0, 0, 0 }, { 1, 1, 1 }, { 0, 2, 3 } }):show()
bezier.new({ { 0, 0, 0 }, { 1, 1, 1 }, { 0, 2, 3 } }, { 1, 0.2, 1 }):show()
bspline.new({ { 0, 0, 0 }, { 1, 2, 1 }, { 2, 2, 2 }, { 3, 0, 3 } }, { 0, 1 }, { 4, 4 }, 3):show()wire - 线框
lua
wire.new(list) -- 从边缘列表创建
wire.new(other_wire) -- 复制构造参数:
list- table - 边缘或线框对象列表{edge1, edge2, ...}
polygon - 多边形
lua
polygon.new(point_list) -- 从点列表创建
polygon.new(other_polygon) -- 复制构造参数:
point_list- table - 3D点列表{point1, point2, ...}, 其中point:{x,y,z}
示例:
lua
local triangle = polygon.new({
{0, 0, 0},
{1, 0, 0},
{0.5, 1, 0}
})face - 面
lua
face.new(shape_object) -- 从线框/边缘/多边形创建面
face.new(other_face) -- 复制构造参数:
shape_object- shape - wire、edge 或 polygon 对象
子类:
lua
-- 平面
plane.new(origin, normal, uv) -- pos:原点[array3], normal:法向量[array3], uv: XY轴限位[array4]
-- 圆柱
cylindrical.new(origin, normal, radius, uv) -- radius:半径[number], uv: 圆弧和高度限位[array4]
-- 圆锥
conical.new(origin, normal, angle, radius, uv) -- angle:倾角[number], uv: 圆弧和高度限位[array4]示例:
lua
plane.new({ 1, 1, 1 }, { 0, 0, 1 }, { -1, 1, -1, 1 }):show()
cylindrical.new({ 1, 1, 1 }, { 0, 0, 1 }, 3, { 0, 360, -1, 2 }):show()
conical.new({ 1, 1, 1 }, { 0, 0, 1 }, 45, 3, { 0, 270, -1, 2 }):show()text - 文本
lua
text.new(str)
text.new(str, size)参数:
str- string - 要显示的文本内容size- number - 字体大小
示例:
lua
text.new('hello', 1):x(2):show()⚙️ 形状方法
基础操作
shape:type() - 获取类型
返回形状类型字符串:
"vertex"- 顶点"edge"- 边"face"- 面"shell"- 壳"wire"- 线框"solid"- 实体"compound"- 复合体
shape:copy() - 复制形状
返回当前形状的副本。
布尔运算
shape:fuse() - 融合(并集)
lua
result = shape1:fuse(shape2)shape:cut() - 切割(差集)
lua
result = shape1:cut(shape2)shape:common() - 交集
lua
result = shape1:common(shape2)示例:
lua
local box1 = box.new(2, 2, 2)
local box2 = box.new(1, 1, 1):pos(1, 1, 1)
local union = box1:copy():fuse(box2) -- 并集
local diff = box1:copy():cut(box2) -- 差集
local inter = box1:copy():common(box2) -- 交集几何变换
shape:fillet() - 圆角
lua
shape:fillet(radius, conditions)参数:
radius- number - 圆角半径conditions- table - 条件参数type- string - 边缘类型筛选(line/circle/ellipse/hyperbola/parabola/bezier_curve/bspline_curve/offset_curve/other_curve)first- array3 - 边缘起点{x, y, z}last- array3 - 边缘终点{x, y, z}tol- number - 边缘起始点判断的容差min/max- array3 - 位置范围{x, y, z}
详细请参考:圆角和倒角操作
shape:chamfer() - 倒角
lua
shape:chamfer(distance, conditions)参数与 fillet() 类似。
shape:prism() - 拉伸
lua
shape:prism(x, y, z)沿指定方向拉伸形状。
生成规则:
vertex->edge->face->solidwire->shell->solid
示例:
lua
-- 从顶点拉伸三次成为正方体(vertex->edge->face->solid)
vertex.new(0, 0, 0):prism(0, 0, 1):prism(0, 1, 0):prism(1, 0, 0):show()shape:revol() - 旋转体
lua
shape:revol(pos, dir, angle)参数:
pos- array3 - 旋转轴位置点{x, y, z}dir- array3 - 旋转轴方向向量{x, y, z}angle- number - 旋转角度(度)
示例:
lua
local profile = polygon.new({{0,0,0}, {1,0,0}, {1,1,0}, {0,1,0}})
local face = face.new(profile)
local solid = face:revol({0,0,0}, {0,0,1}, 360) -- 绕Z轴旋转360度shape:pipe() - 管道
沿着线(wire)或边(edge)生成一条管道,要求shape不是实体形状,如vertex、edge、wire、face
lua
shape:pipe(wire)参数:
wire- wire - 管道路径
示例:
lua
local w = bezier.new({ { 0, 0, 0 }, { 0, 0, 2 }, { 0, 2, 2 }, { 0, 2, 4 }, { 0, 0, 4 } })
circle.new({ 0, 0, 0 }, { 0, 0, 1 }, 1):pipe(w):show() -- 一条沿贝塞尔曲线走向的管道位置与姿态
单轴设置
lua
shape:x(value) -- 设置X坐标
shape:y(value) -- 设置Y坐标
shape:z(value) -- 设置Z坐标
shape:rx(angle) -- 绕X轴旋转(度)
shape:ry(angle) -- 绕Y轴旋转(度)
shape:rz(angle) -- 绕Z轴旋转(度)组合设置
lua
shape:pos(x, y, z) -- 设置绝对位置
shape:rot(rx, ry, rz) -- 设置绝对角度(度)相对移动
lua
shape:move("pos", x, y, z) -- 相对平移
shape:move("rot", rx, ry, rz) -- 相对旋转(度)示例:
lua
local obj = box.new()
obj:pos(10, 20, 30) -- 移动到 (10, 20, 30)
obj:rot(0, 0, 45) -- 绕Z轴旋转45度
obj:move("pos", 5, 0, 0) -- 沿X轴移动5个单位
obj:move("rot", 0, 90, 0) -- 绕Y轴再旋转90度外观设置
shape:color() - 设置颜色
lua
shape:color(name_or_hex)参数:
name_or_hex- string - 颜色名称或十六进制值
示例:
lua
shape:color("red")
shape:color("#FF5733")shape:transparency() - 设置透明度
lua
shape:transparency(value)参数:
value- number - 透明度值 (0.0 ~ 1.0)0.0- 完全不透明1.0- 完全透明
🎨 颜色名称
颜色名称参考 OpenCASCADE 的 Quantity_NameOfColor 枚举(移除 Quantity_NOC_ 前缀)。
基础颜色
| 颜色名 | 说明 | 示例值 |
|---|---|---|
red | 红色 | #FF0000 |
green | 绿色 | #00FF00 |
blue | 蓝色 | #0000FF |
yellow | 黄色 | #FFFF00 |
cyan | 青色 | #00FFFF |
magenta | 洋红 | #FF00FF |
black | 黑色 | #000000 |
white | 白色 | #FFFFFF |
gray | 灰色 | #808080 |
lightgray | 浅灰 | #D3D3D3 |
📖 更多颜色: 完整颜色列表请参考 OpenCASCADE 文档
📍坐标系
axes - 坐标系类
lua
axes.new() -- 默认单位矩阵,轴长为1
axes.new(length) -- 单位矩阵,轴长为length
axes.new(pose) -- pose矩阵,轴长为1
axes.new(pose, length) -- pose矩阵,轴长为length说明:
用于URDF导出时,配置关节joint位姿
参数:
pose- array6 - 位姿数组,6个数据分别为位置x,y,z和RPY姿态rx,ry,rz(角度)length- number - 所有坐标轴长度(用于显示效果)
方法:
show()- 显示坐标系到界面中move(pose)- 通过pose={x,y,z,rx,ry,rz}变换矩阵,rx,ry,rz单位为角度sdh(a,alpha,d,theta)- 通过标准DH方法变换矩阵,alpha,theta单位为角度mdh(a,alpha,d,theta)- 通过修改DH方法(Craig)变换矩阵,alpha,theta单位为角度
示例:
lua
j1 = axes.new({ 0, 0, 2.5, 90, 0, 0 }, 3)
j1:show()🤖URDF导出
有两个相关类link和joint
link - 连杆类
lua
link.new(name, shape)
link.new(name, shape_list)参数:
name- string - 连杆名称shape- shape - 形状shape_list- table - 形状列表
方法:
add(j)-j参数为joint对象,增加指定关节到连杆中export(params)- 生成一个ROS2的URDF包,params参数是一个table,内容为{name, path},name[string]为机器人名称,path[string]为导出路径
joint - 关节类
lua
link.new(name, axes, type, limits)参数:
name- string - 关节名称axes- axes - 坐标系type- string - 关节类型:fixed, revolute, continuous, prismatic, floating, planarlimits- table - 关节限制:lower, upper, effort, velocity,全为number
示例:
lua
-- 6自由度机械臂URDF建模及URDF导出示例
-- 通用
local r_shell = 32;
local h_motor = 90;
local offset = h_motor / 2 - r_shell
shell = cylinder.new(r_shell, h_motor)
shell:fillet(5, { type = 'circle', min = { r_shell - 1e-2, -1e-2, h_motor - 1e-2 } });
shell:fuse(cylinder.new(r_shell, h_motor / 2):z(h_motor / 2):rx(90));
-- shell:cut(text.new('JellyCAD', 8):pos(-r_shell / 2, -4, h_motor + 1):prism(0, 0, -2)) -- 关节盖刻字(操作很耗时)
-- 生成连接柱
function get_pole(r_outer, r2, h)
local r1 = r_outer - 1
local h_stair = 2
local h_cylinder = r1 - r2 + h_stair
local stair = cylinder.new(r1, h_cylinder):cut(torus.new(r1, r1 - r2):pos(0, 0, h_cylinder))
stair:fillet(1, { type = 'circle', min = { r1 - 1e-2, -1e-2, h_stair - 1e-2 } });
local stair_top = stair:copy():rx(180):z(h)
local pole = cylinder.new(r2, h):fuse(stair):fuse(stair_top)
return pole
end
-- 基座
local r_base = 50;
local h_base = 35;
base_link = cylinder.new(r_base, h_base);
local R1 = r_base - r_shell
local R0 = R1 + 2
elips = edge.new('elips', { R1 + r_shell, 0, h_base }, { 0, 1, 0 }, R0, R1);
ellipse = face.new(elips);
ellipse:revol({ 0, 0, 0 }, { 0, 0, 1 }, 360)
base_link:cut(ellipse);
base_link:fillet(3, { type = 'bspline_curve', min = { r_base - 1e-2, -1e-2, (h_base - R0) - 1e-2 } });
-- 肩部
sholder = shell:copy():z(h_base);
-- 上臂
local h_upperarm = 150
local r_upperarm = 20
local z_upperarm = h_base + h_motor / 2
upperarm = shell:copy();
upperarm:rot(90, 180, 0);
upperarm:fuse(get_pole(r_shell, r_upperarm, h_upperarm):pos(0, -h_motor / 2, h_motor / 2))
upperarm:fuse(shell:copy():rot(90, 0, 0):pos(0, 0, h_motor + h_upperarm))
upperarm:pos(0, -h_motor / 2, z_upperarm)
-- 前臂
local h_forearm = 120
local r_forearm = 20
local z_forearm = h_base + h_upperarm + r_shell + h_motor + offset
forearm = face.new(edge.new('circ', { 0, 0, 0 }, { 0, 0, 1 }, r_shell));
forearm:revol({ 0, -r_shell, 0 }, { 1, 0, 0 }, -90)
forearm:fuse(get_pole(r_shell, r_forearm, h_forearm))
forearm:fuse(shell:copy():rot(90, 0, 180):pos(0, -h_motor / 2, h_motor / 2 + h_forearm))
forearm:pos(0, -offset, z_forearm + r_shell)
-- 手腕1
local z_wrist1 = z_forearm + h_forearm + h_motor + r_shell
wrist1 = shell:copy():rot(180, 0, 0):pos(0, -h_motor - offset, z_forearm + h_forearm + h_motor + r_shell)
-- 手腕2
local z_wrist2 = z_forearm + h_forearm + 2 * h_motor - offset
wrist2 = shell:copy():rot(90, 0, 180):pos(0, r_shell - 2 * h_motor, z_wrist2)
-- 手腕3
local h_flank = 10
wrist3 = cylinder.new(r_shell, h_flank):rot(90, 0, 0):pos(0, r_shell - 2 * h_motor, z_wrist2)
-- 毫米单位转为米,生成URDF
base_link:scale(1e-3):color('#6495ED'):mass(0.1)
sholder:scale(1e-3):color('#8470FF'):mass(0.4)
upperarm:scale(1e-3):color('#FFC1C1'):mass(1)
forearm:scale(1e-3):color('#FFC100'):mass(0.8)
wrist1:scale(1e-3):color('#FF8247'):mass(0.4)
wrist2:scale(1e-3):color('#FFE7BA'):mass(0.4)
wrist3:scale(1e-3):color('#C1CDC1'):mass(0.1)
local d1 = z_upperarm * 1e-3
local a2 = (h_upperarm + h_motor) * 1e-3
local a3 = (h_forearm + h_motor / 2 + r_shell) * 1e-3
local d4 = (h_motor + offset) * 1e-3
local d5 = h_motor * 1e-3
local d6 = (h_motor / 2 + h_flank) * 1e-3
joint_axes1 = axes.new({ 0, 0, d1, 0, 0, 0 }, 0.1)
joint_axes2 = joint_axes1:copy():move({ 0, 0, 0, 90, 0, 0 })
joint_axes3 = joint_axes2:copy():move({ 0, a2, 0, 0, 0, 0 })
joint_axes4 = joint_axes3:copy():move({ 0, a3, 0, 0, 0, 0 })
joint_axes5 = joint_axes4:copy():move({ 0, 0, d4, -90, 0, 0 })
joint_axes6 = joint_axes5:copy():move({ 0, 0, d5, 90, 0, 0 })
joint_tool = joint_axes6:copy():move({ 0, 0, d6, 0, 0, 0 })
j1_limit = { lower = -6.28, upper = 6.28, velocity = 3.14, effort = 9 }
j2_limit = { lower = -6.28, upper = 6.28, velocity = 3.14, effort = 9 }
j3_limit = { lower = -3.14, upper = 3.14, velocity = 3.14, effort = 9 }
j4_limit = { lower = -6.28, upper = 6.28, velocity = 3.14, effort = 3 }
j5_limit = { lower = -6.28, upper = 6.28, velocity = 3.14, effort = 3 }
j6_limit = { lower = -6.28, upper = 6.28, velocity = 3.14, effort = 3 }
joint1 = joint.new("joint1", joint_axes1, "revolute", j1_limit)
joint2 = joint.new("joint2", joint_axes2, "revolute", j2_limit)
joint3 = joint.new("joint3", joint_axes3, "revolute", j3_limit)
joint4 = joint.new("joint4", joint_axes4, "revolute", j4_limit)
joint5 = joint.new("joint5", joint_axes5, "revolute", j5_limit)
joint6 = joint.new("joint6", joint_axes6, "revolute", j6_limit)
jointT = joint.new("jointT", joint_tool, "fixed")
urdf = link.new("base_link", base_link)
link1 = link.new("link1", sholder)
link2 = link.new("link2", upperarm)
link3 = link.new("link3", forearm)
link4 = link.new("link4", wrist1)
link5 = link.new("link5", wrist2)
link6 = link.new("link6", wrist3)
link_tool = link.new("link_tool", shape.new())
urdf:add(joint1):next(link1):add(joint2):next(link2):add(joint3):next(link3):add(joint4):next(link4):add(joint5):next(
link5):add(joint6):next(link6):add(jointT):next(link_tool)
show({ base_link, sholder, upperarm, forearm, wrist1, wrist2, wrist3 })
show({ joint_axes1, joint_axes2, joint_axes3, joint_axes4, joint_axes5, joint_axes6, joint_tool })
urdf:export({ name = 'myrobot', path = 'd:/', ros_version = 2 })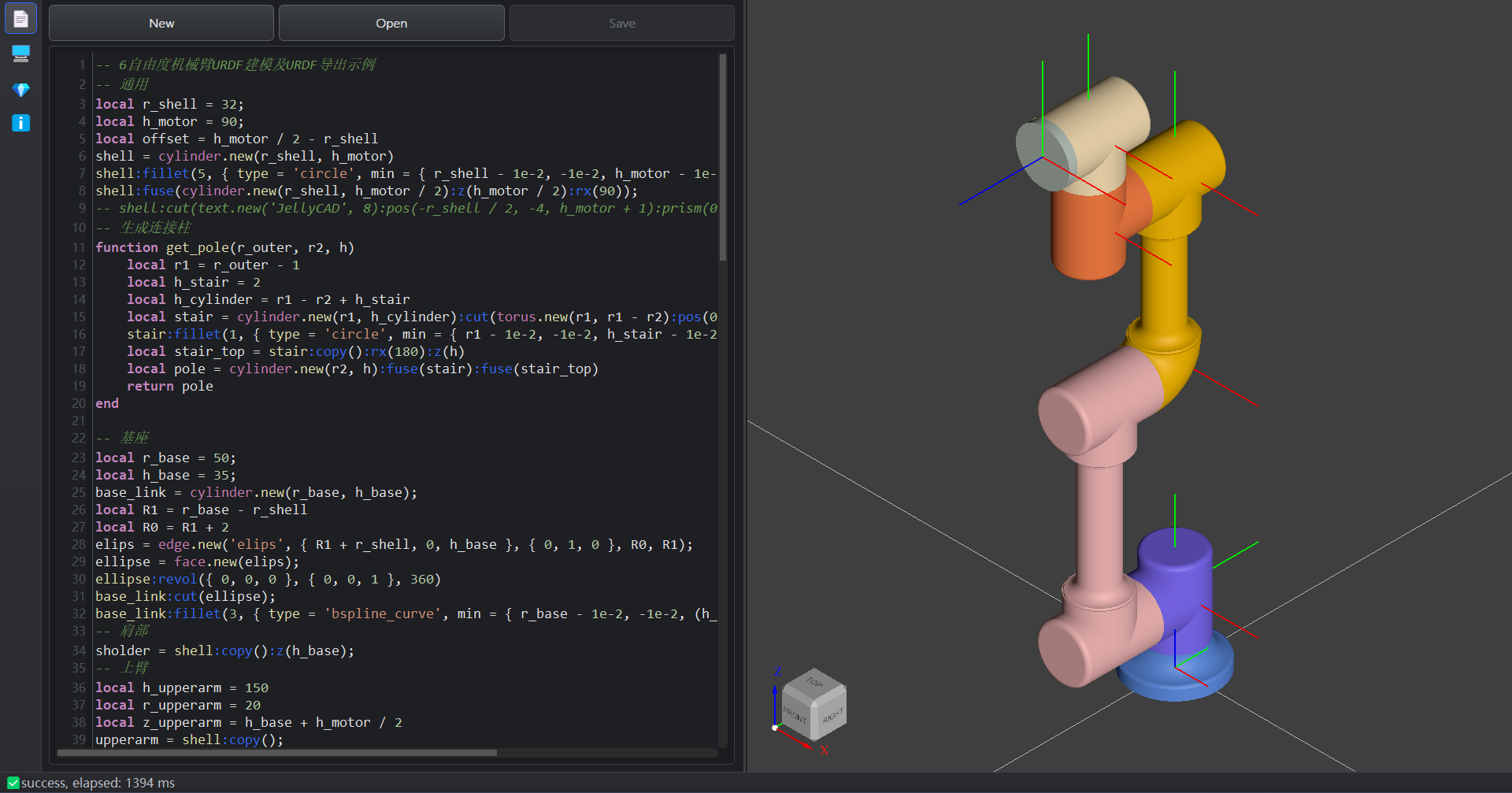
ROS2使用方法
bash
sudo apt update
sudo apt install ros-$ROS_DISTRO-urdf-launch
mkdir -p ~/ws_ros2/src
cp -r /mnt/d/myrobot ~/ws_ros2/src/
cd ~/ws_ros2
colcon build --symlink-install
source install/setup.bash
ros2 launch urdf_launch display.launch.py urdf_package:=myrobot urdf_package_path:=urdf/myrobot.urdf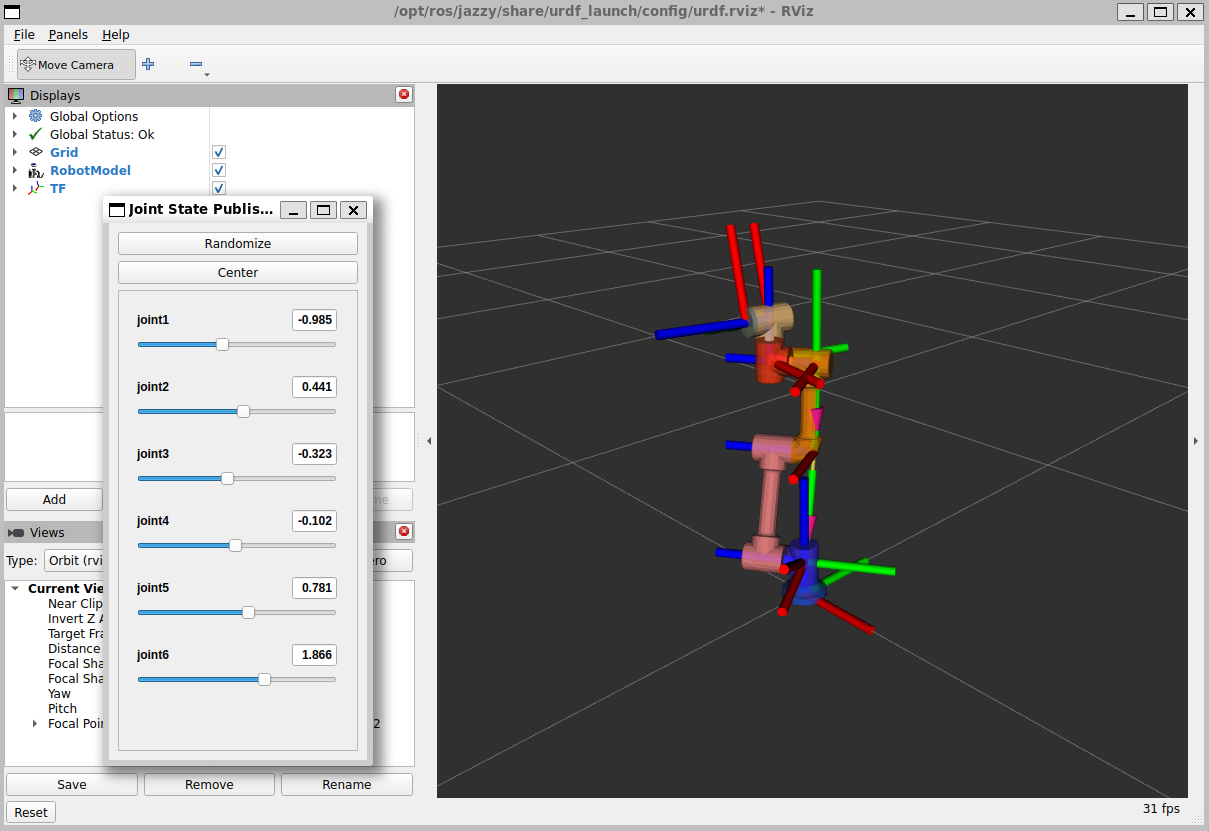
💡 使用示例
创建简单模型
lua
-- 创建一个带圆角的盒子
local mybox = box.new(10, 10, 5)
mybox:fillet(1, {})
mybox:color("blue")
mybox:transparency(0.3)
show(mybox)
-- 导出模型
export_stl(mybox, "rounded_box.stl")布尔运算示例
lua
-- 创建一个开孔的立方体
local cube = box.new(10, 10, 10)
local hole = cylinder.new(3, 12):pos(5, 5, -1)
local result = cube:cut(hole)
result:color("green")
show(result)创建旋转体
lua
-- 创建一个花瓶轮廓
local profile = polygon.new({
{0, 0, 0},
{3, 0, 0},
{4, 2, 0},
{3.5, 5, 0},
{4, 8, 0},
{0, 8, 0}
})
-- 旋转生成花瓶
local vase = face.new(profile):revol({0,0,0}, {0,1,0}, 360)
vase:color("magenta")
vase:transparency(0.2)
show(vase)